En-route Aerodrome Real Time Simulator
A light weight, real-time platform that supports small and medium scale distributed simulations in the following areas:
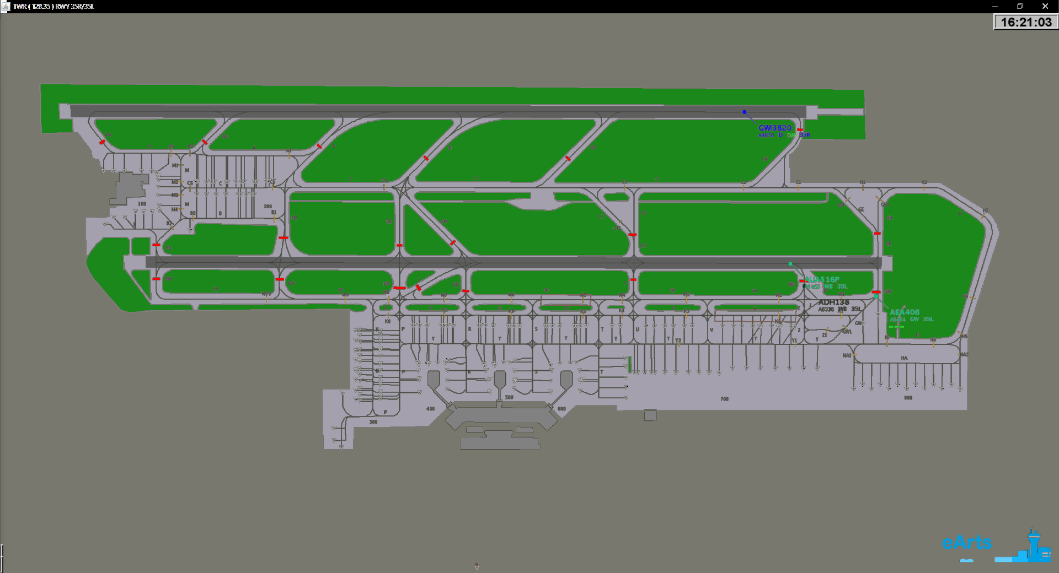
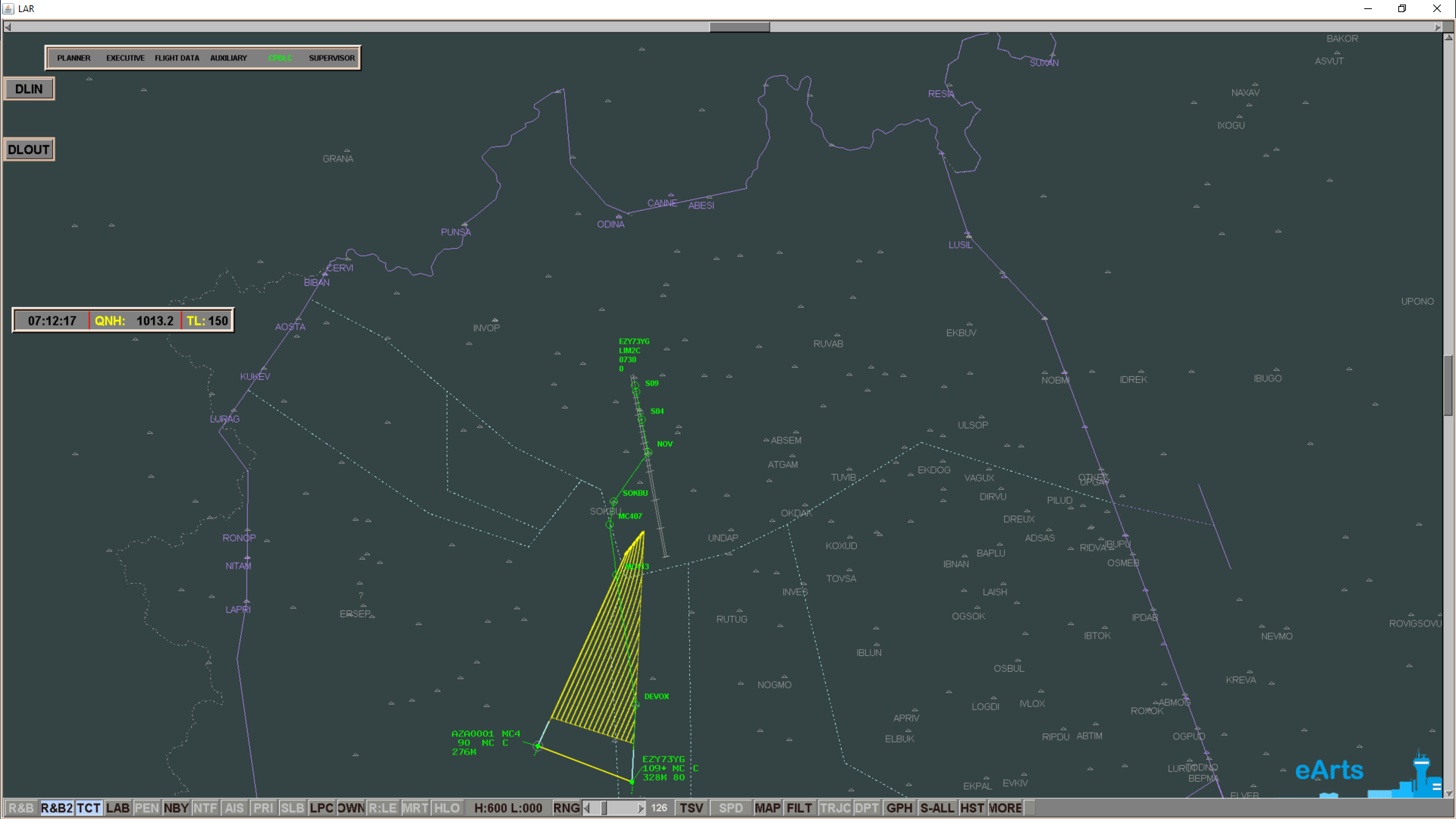
The platform simulates En-Route & Approach and Aerodrome operations.
It has all the essential en-route and Tower ATC functionalities and can be easily expanded to integrate more advanced features.
It can run on a single laptop (standalone mode) or in a distributed environment across an entire network for any kind of medium-scale simulation scenario.
It includes controller working positions and pseudo-pilots working positions.
Its modular design enables easy adjustment of the ATC tools setup according to the needs of the scenario.

Developed in Kotlin and Java and distributed in a Docker Container for portability
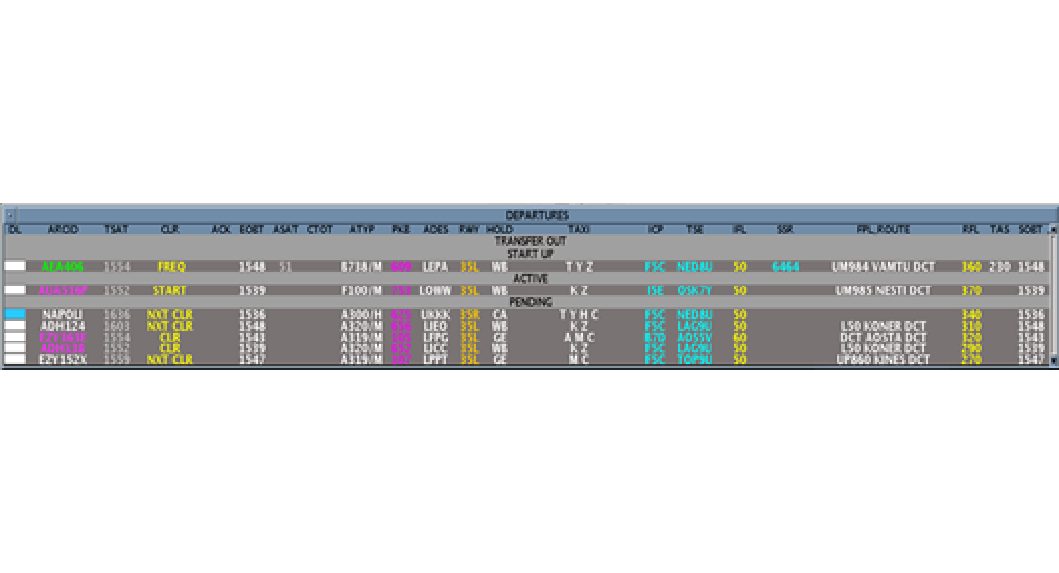
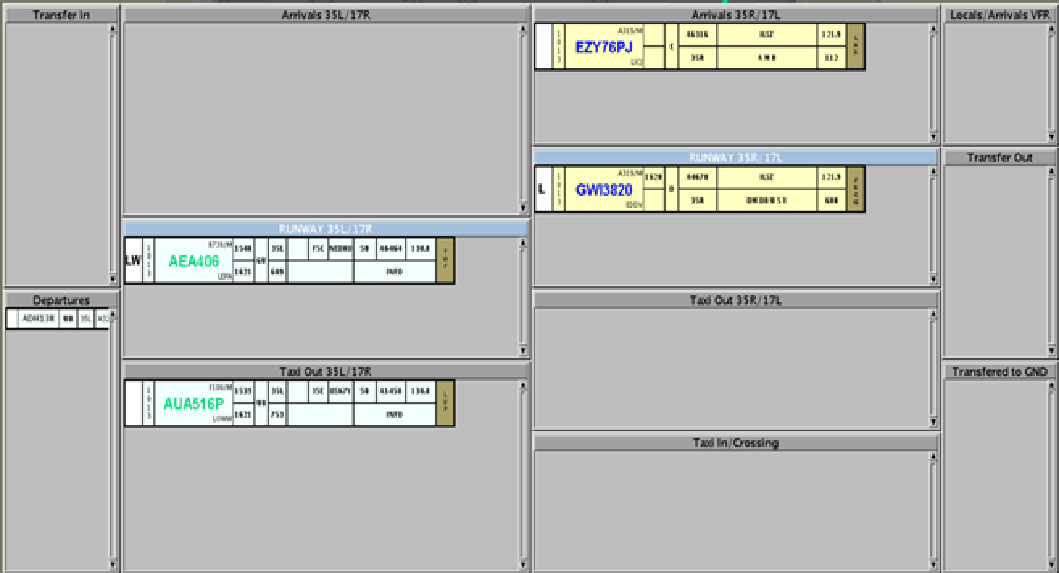
The airport simulator can replicate three types of controller working environments, Clearance Delivery, Ground Movement Control and Tower/Runway Control.
These different roles could be combined in a single position.
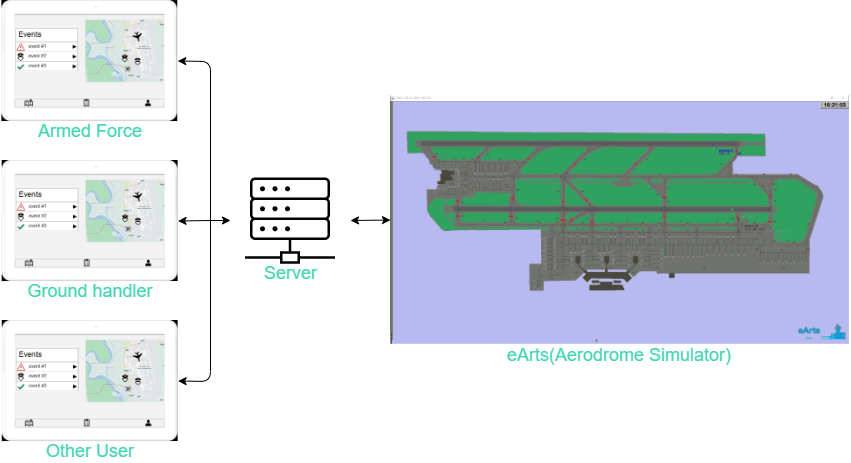
eARTS will be used as simulation platform to validate the results of ASPRID project.
Validation test will be organized with the collaboration of several stakeholders representative as: Air Traffic Controller, Drone Pilot, Armed Force and Ground Hadler.
READ MORE»
| Cookie | Duration | Description |
|---|---|---|
| pll_language | 1 year | This cookie is set by Polylang plugin for WordPress powered websites. The cookie stores the language code of the last browsed page. |
| Cookie | Duration | Description |
|---|---|---|
| cookielawinfo-checkbox-funzionali | 1 year | No description |